今回はロボット分野の研究者である秋山准教授をゲストにお呼びして、研究者としてのキャリアや研究内容などについてお聞きしながらモデリングしていきました。
大きな時系列の流れをモデリング
冒頭で内輪の懐古話をした後は、秋山先生の研究者としてのキャリアをお聞きしながらモデリングをしました。ここでは青いノードでキャリアの変遷を描きつつ、それぞれの時期でどんなことをやっていたのかを赤いノードで示しています。
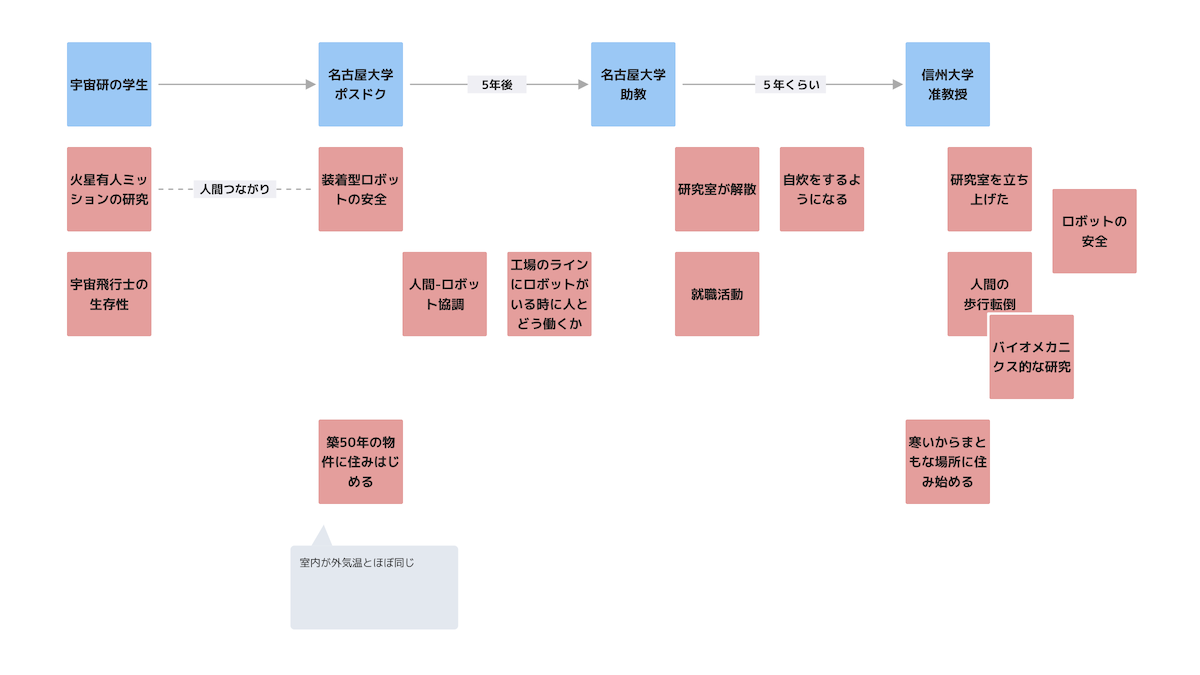
このように大きな時系列の流れを描くモデルは、いろいろなところで活用できます。例えばプロジェクトのマイルストーンを描いて、それぞれの下で具体的なタスクを洗い出す場面などが考えられます。他には、将来展望やロードマップを大きな時系列の流れとして描いて関係者間の認識を合わせることに使うこともできます。
ブレスト結果を整理する
ロボットの研究についてお話を聞く前に、そもそも世の中にはどんなロボットがあるのかを思いつくままに書き出してみました。
このようなブレインストーミングのような使い方は、一般的な定義の「システムモデリング」とは言えないかもしれませんが、レヴィとしてはモデリングの一種またはモデリングのプロセスの一つとして扱っています。
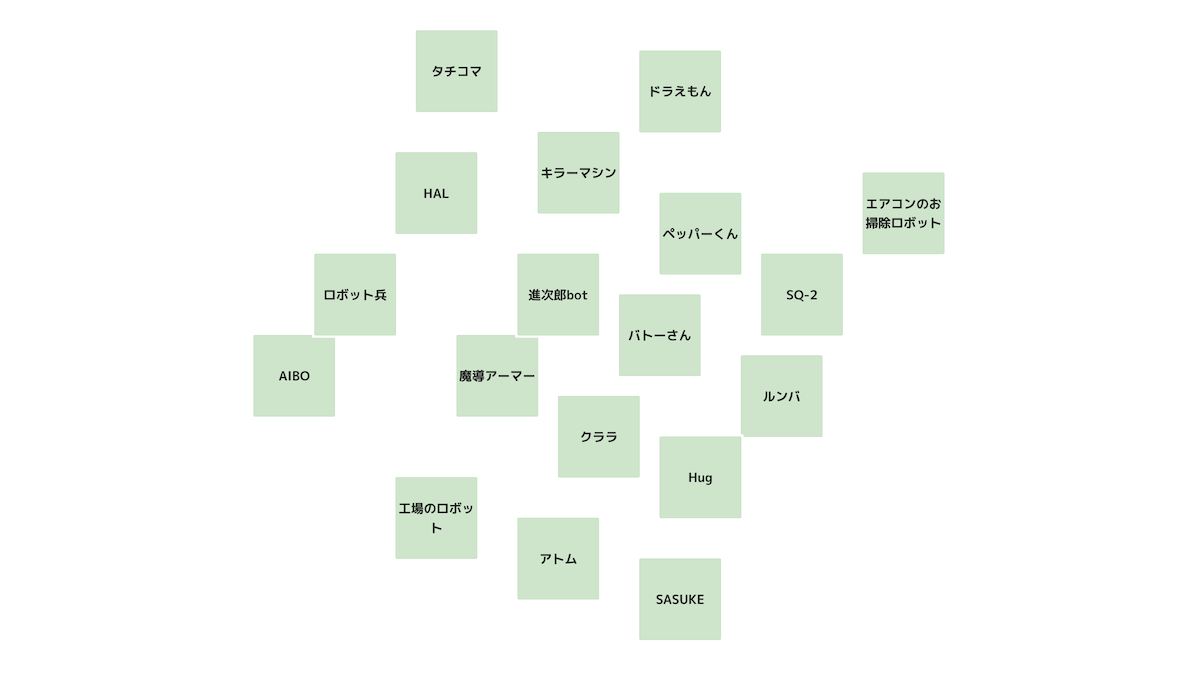
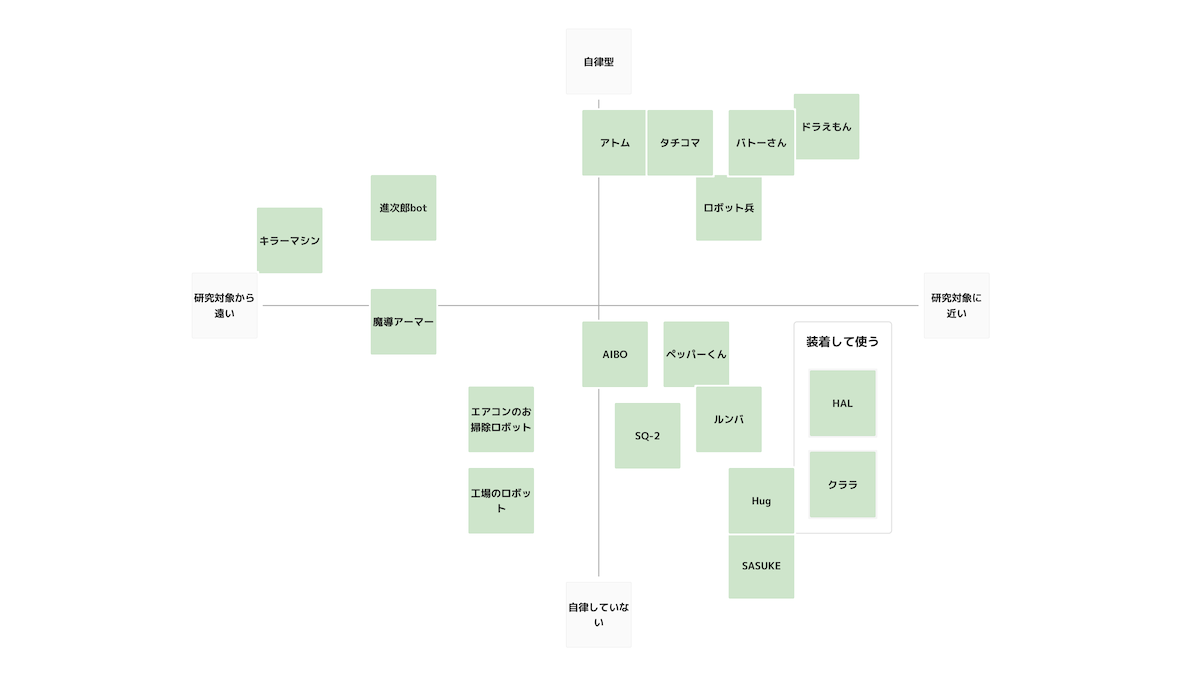
上図のように「魔導アーマー」や「バトーさん」など、言いたい放題で様々なロボット(?)が出てきたので、次のステップとしてはそれらを2つの軸で分類整理してみました。
2つの軸でアイデアや要素を整理する手法はビジネスシーンのいろいろなところで活用できます。Balusを使えばブレスト、軸による整理またはグルーピング、その後の構造化をシームレスかつ効果的に行うことができます。
今回は「自律性が高いか低いか」と「秋山先生の研究対象に近いか遠いか」の2つの軸を設定して、様々なロボットを分類整理しました。
目的と課題の因果を構造化
ロボットブレストとその整理によって秋山先生がどのような領域を研究対象にしているのか分かってきたので、次はその領域における研究目的について話を聞いてみました。
一般的に「目的」や「課題」は階層構造をなしていることが多いので、次のようなモデルで整理すると「最終的に達成したい大きな目的」と「焦点を当てて取り組んでいる目先の目的または課題」のつながりを可視化することができます。
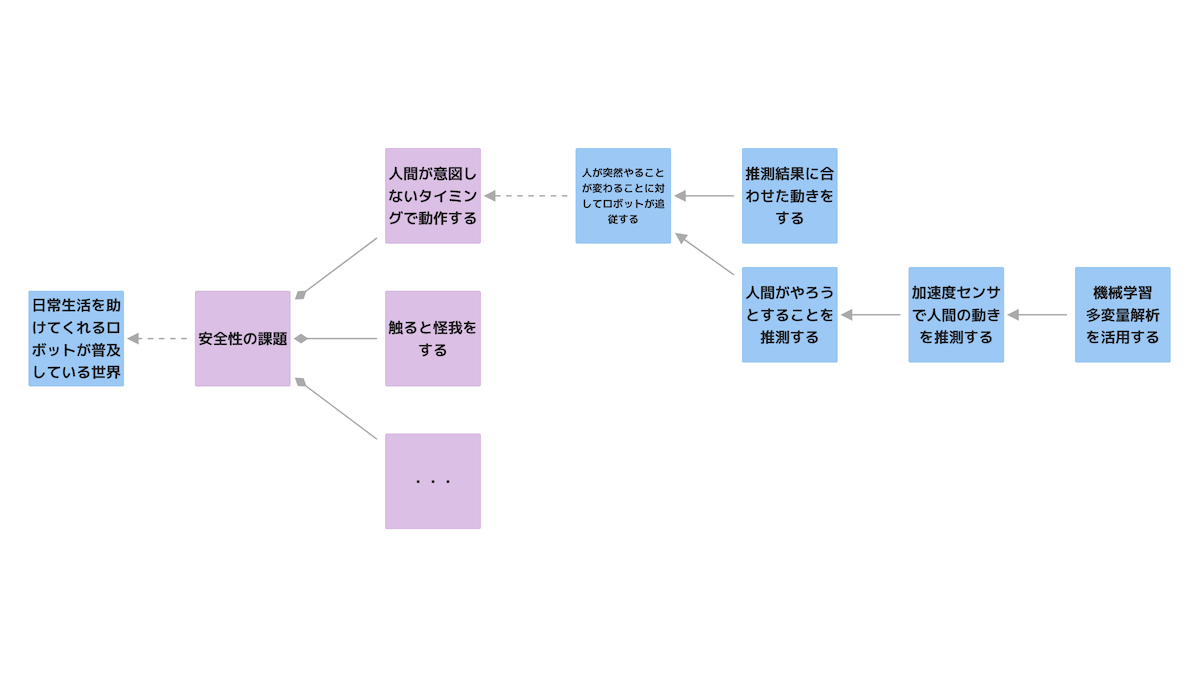
このモデルでは「目的」や「実現したいこと」を青いノードで、「課題」や「解決したいこと」を紫色のノードで描いています。また、実線の矢印は「促進の関係」と、点線の矢印は「阻害の関係」を表しています。「目的(青)」と「課題(紫)」の間は点線で結ばれることになり、青同士・紫同士は実線で結ばれることになります。
研究とシステムモデリング
今回は研究者と一緒に「研究キャリア」や「研究内容」などをモデリングしていきました。「研究」をシステムとして捉えることで、そのような表現が可能となります。
研究活動とビジネスにおける課題解決活動や製品開発活動はよく似ているところがあります。今回のモデリングが、研究者のみならず様々な領域の皆さんにとって整理・可視化・認識合わせのヒントになれば幸いです。